
Department of Electro-Optical Engineering, National Taipei University of Technology, 10608, Taipei, TAIWAN
Kirigami-based soft robots with light-responsive properties
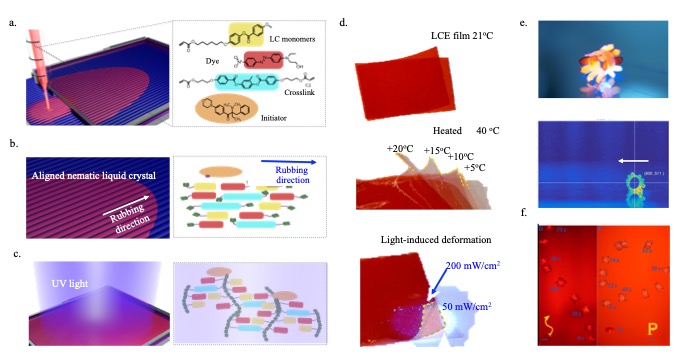
The development of stimuli-responsive soft actuators, a task largely undertaken by material scientists, has become a major driving force in pushing the frontiers of micro- robotics. Due to restrictions in sample size (below few centimeters) and lack of actuation complexity, such soft actuators are based on simple architectures with limited degrees of freedom in movement. In this talk, we apply kirigami-based techniques to fabricate complex 3D robotic structures based on LCNs (liquid crystal polymer networks) [1,2]. Under external stimuli, LCNs demonstrate the specific form of deformation and its structural anisotropy can be programmed by tuning molecular orientation in advanced [3]. Their versatile deformabilities upon heat/light stimuli give rise to a fast- increasing interest in the realization of novel soft robotic systems, in which the nature-inspired strategies are often adopted. Such 2D-to-3D structural transformations can give rise to mechanical actuation upon light illumination, thus allowing the realization of kirigami-based light-fuelled robotics. A kirigami rolling robot, where a light beam controls the multi-gait motion and steers the moving direction in 2D, realizing complex and flexible 3D structures with light-activated robotic functions [4].
References
- White, Timothy J.; Broer, Dirk. Nat. Mater. 2015, 14, 1087-1098.
- Ohm , Christian; Brehmer, Martin; Zentel, Rudolf. Adv. Mater. 2010, 22, 3366-3387.
- Zeng, Hao; Wasylczyk, Piotr; Parmeggiani, Camilla; Martella, Daniele; Burresi, Matteo, Wiersma Sybolt, Diederik, Adv. Mater. 2015, 27, 3883-3887.
- Cheng , Yu-Chieh; Lu, Hao-Chuan; Lee, Xuan; Zeng, Hao; Priimagi, Arri. Adv. Mater. 2019, (Accepted)